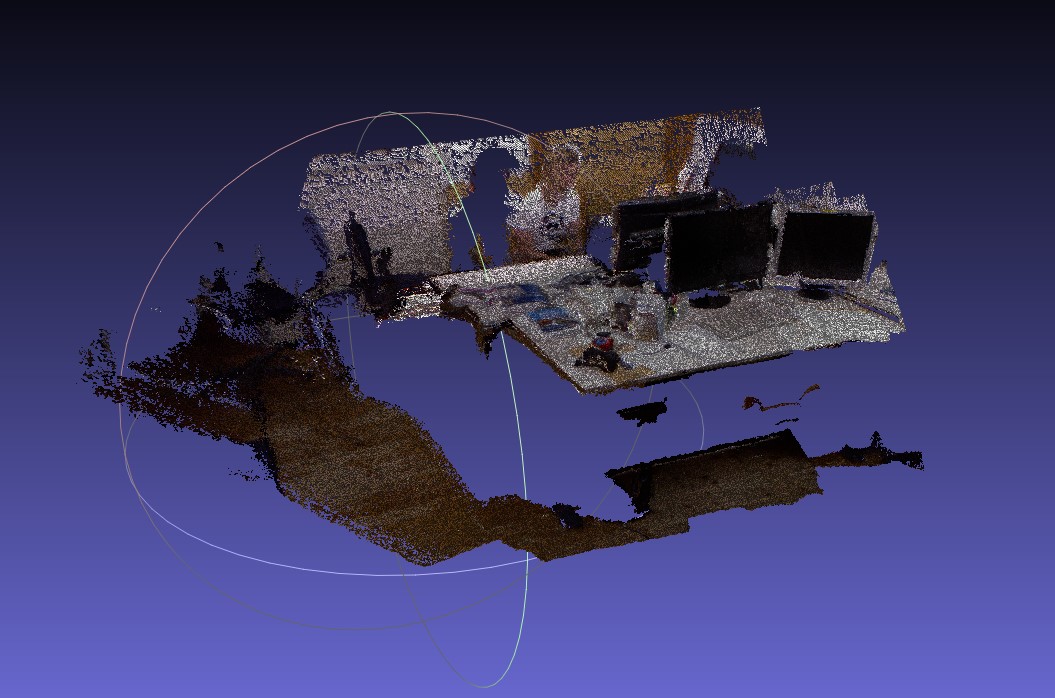
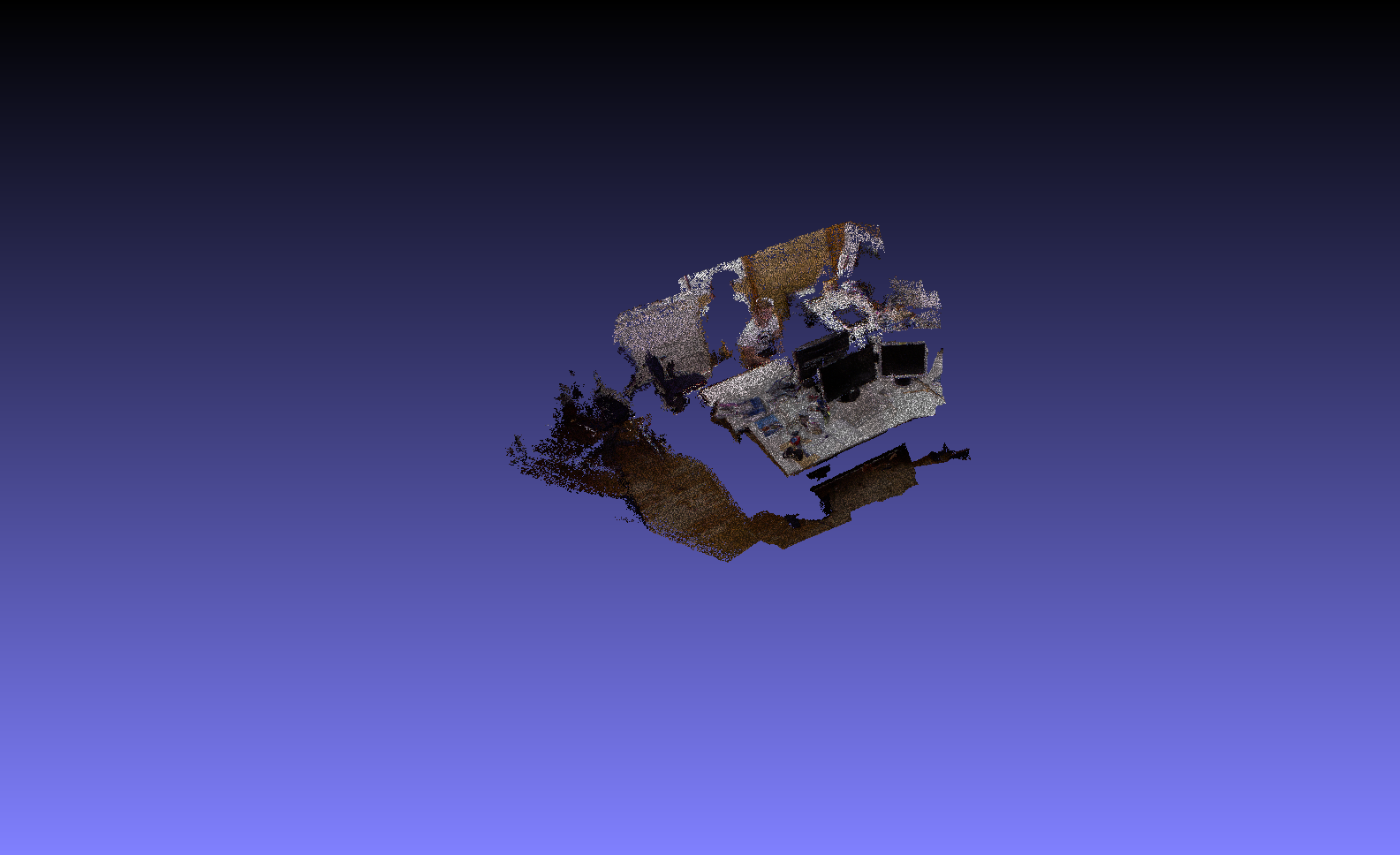
Back-projection to 3D Space
University Project
The goal is to generate 3D meshes from depth and color maps which can be captured by depth cameras, like Microsoft Kinect.
We used the RGB-D SLAM Dataset
Given RGB photo:

and the Depth photo:
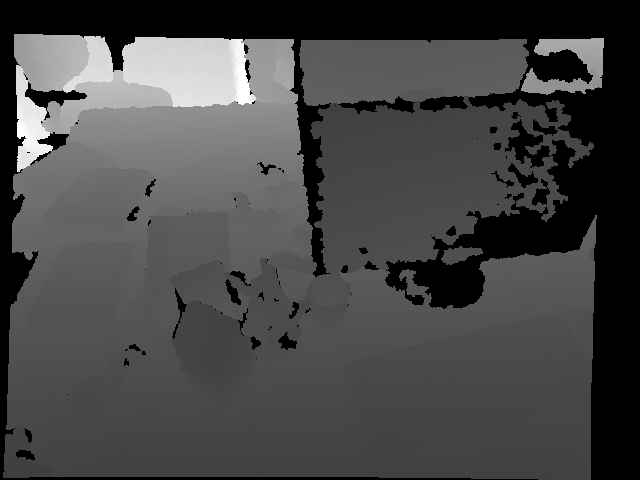
This program uses the intrinsics of the depth camera for the back-projection of the pixels to the camera space and then, using the extrinsics and the trajectory it transforms the points to the world space. Finally, a 3D mesh of the observations is being written.